
This robot was developed for a course on design and manufacturing (2.007). The course presented a challenge for robots to complete a series of tasks, one of which was to lift a weight up a tall vertical rail. The challenges included a number of constraints, from where the robot could be placed on the field at the beginning of the game to how much space it could take up.
starting with the basics
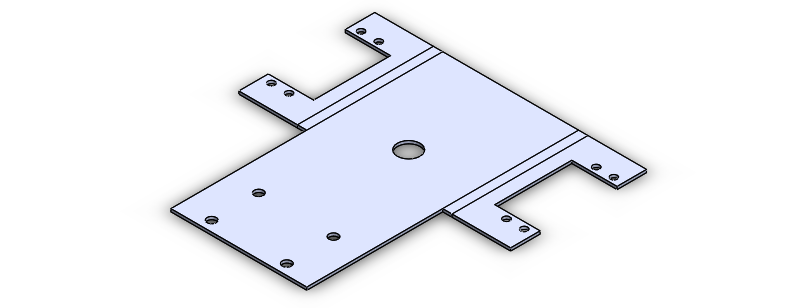

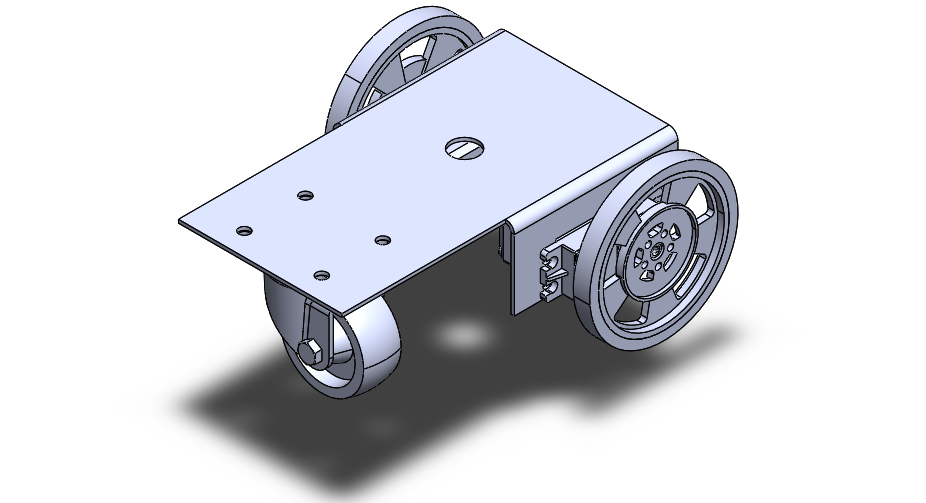
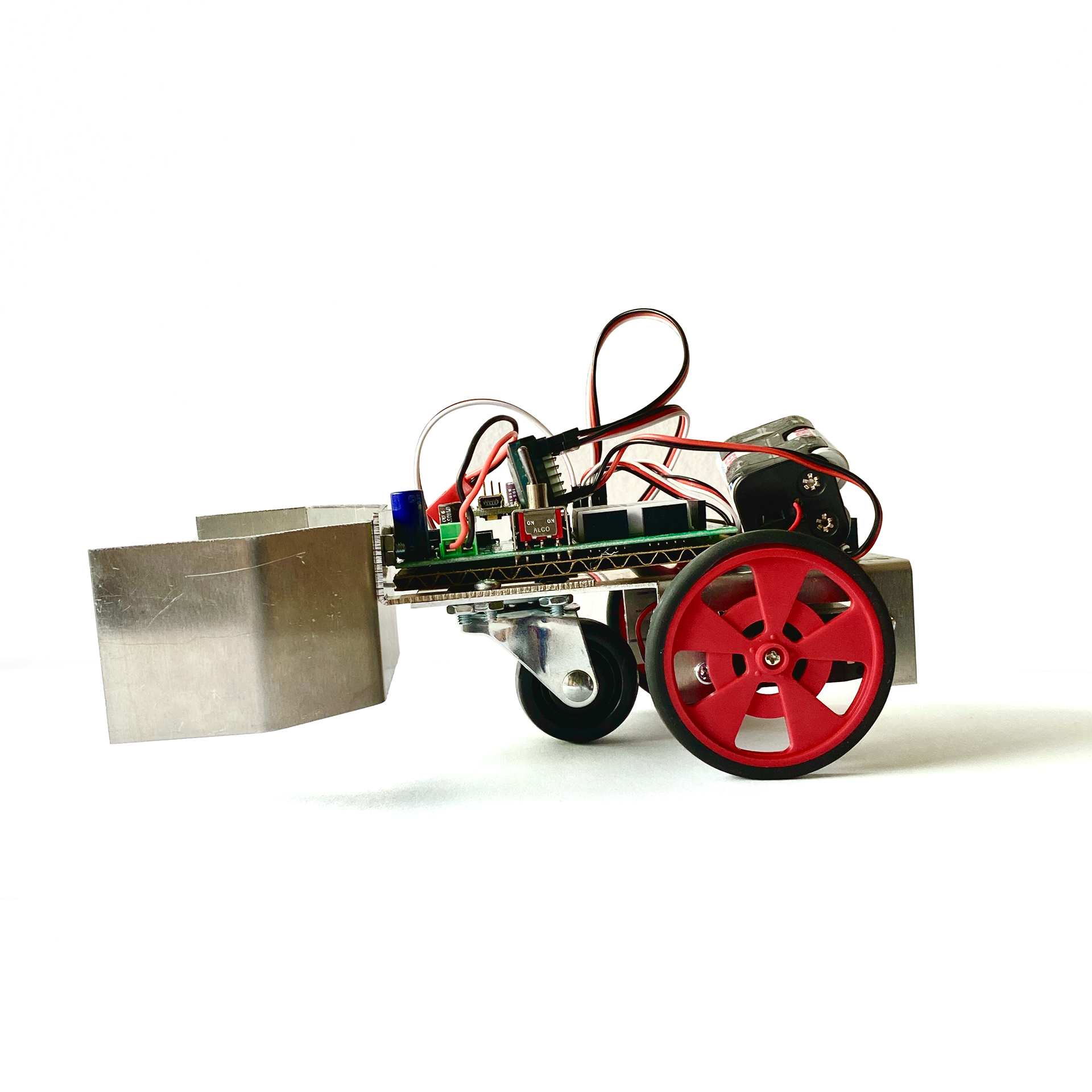
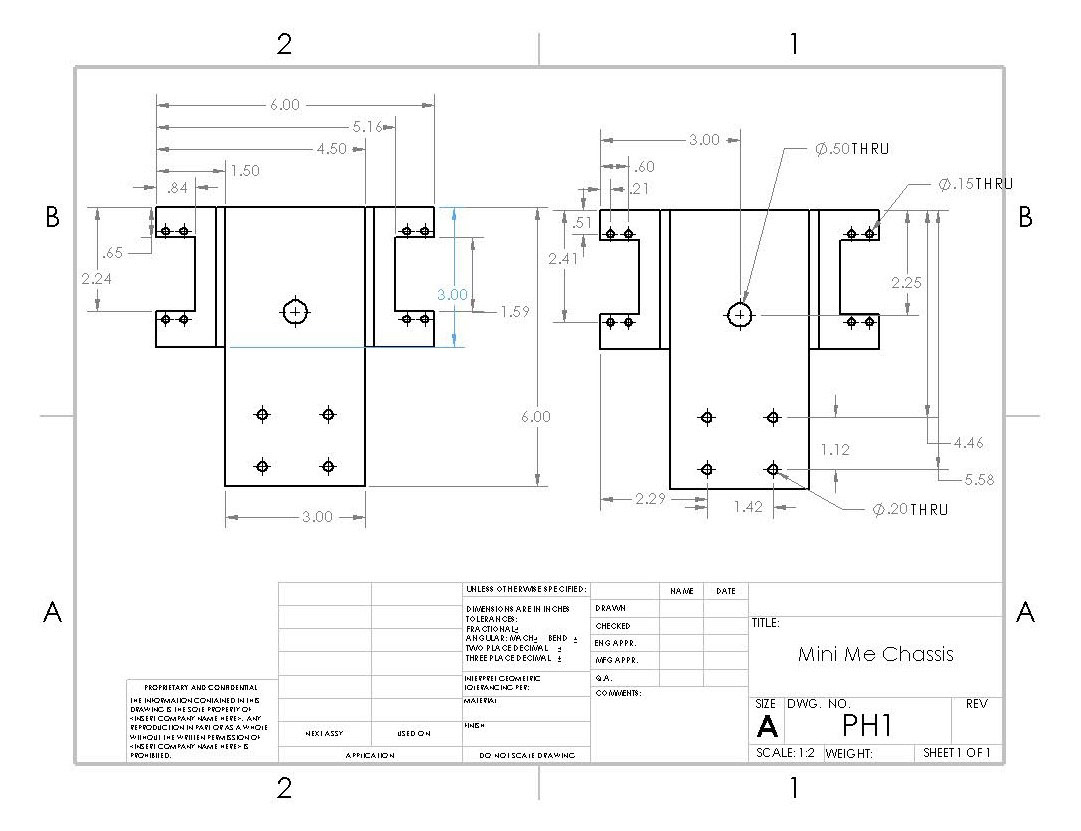
This course began with a short assignment to create a simple robot that could navigate the field. This first robot got all of the students acquainted with CAD, making technical drawings, basic machining, and designing a system ourselves. The robot needed to push a ball around the field, so I attached a simple C-shaped rail to the front to keep things as simple as possible.

I saw that historically, the most successful executions of a lifting mechanism were done with elevator style lifts. I noted the friction that added up with each successive stage as metal rubbed against metal, and given our starting size constraint, I would have needed three or four stages to reach the full lifting height. I thought about the simplest way to lift something: by pulling it straight up. In lifting an object up perfectly vertically, you only need to handle the weight of the object and no other considerations have to be made for different kinds of friction.
I based the premise of my robot on somehow lifting the weight perfectly vertically so as to complete the task as quickly with as few complications possible. This foundation brought me to two new considerations: how is the robot going to get above the height that the weight needs to be lifted while still beginning in the allowed starting dimensions? How is the weight going to be pulled up?
So I based the premise of my robot on somehow lifting the beaver perfectly vertically so as to complete the task as quickly with as few complications possible. This foundation brought me to two new considerations: how is the robot going to get above the height that the beaver needs to be lifted while still beginning in the allowed starting dimensions? and how is the beaver going to be pulled up?
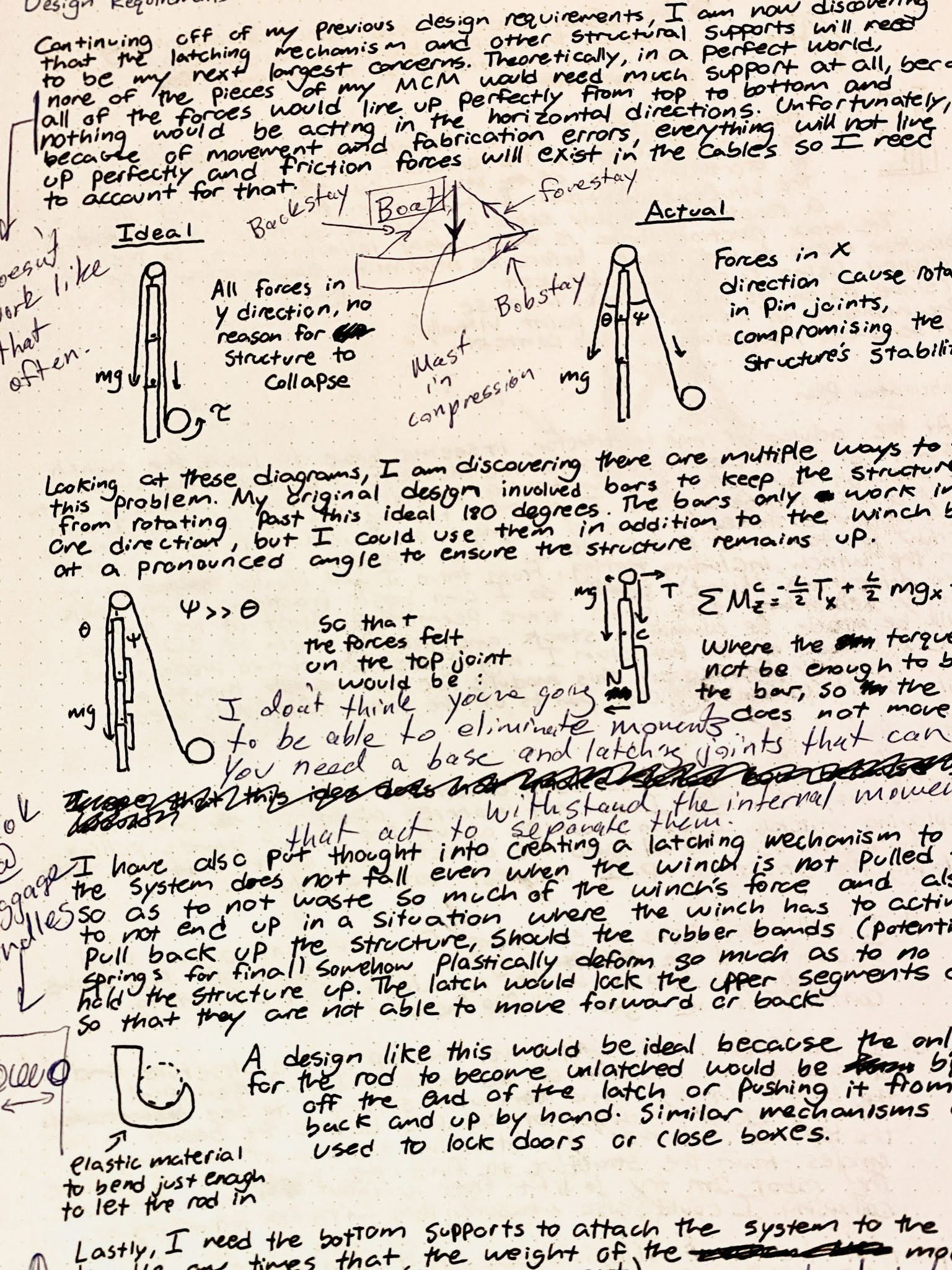
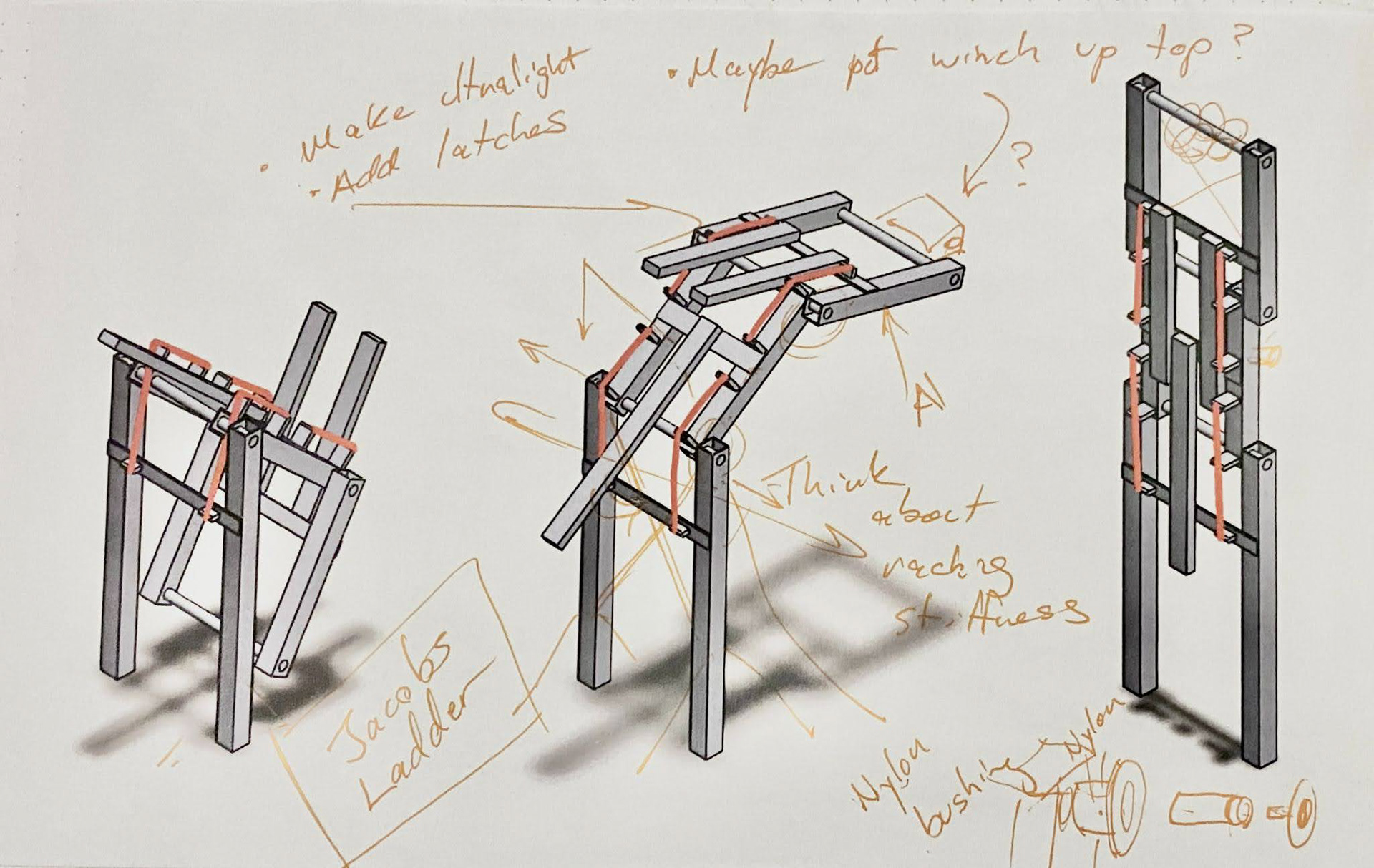
Through many ideas and iterations, I ended up with a folded metal structure that, when released with a simple toggle, flips up into its full height by being pulled up by rubber bands. I was excited to use something as simple as rubber bands in my design, as the project in its small scale lent itself to using materials that would otherwise never provide enough force.


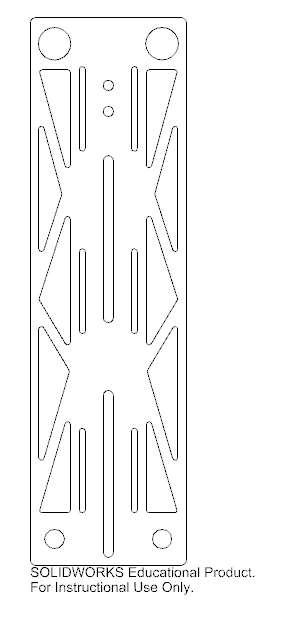
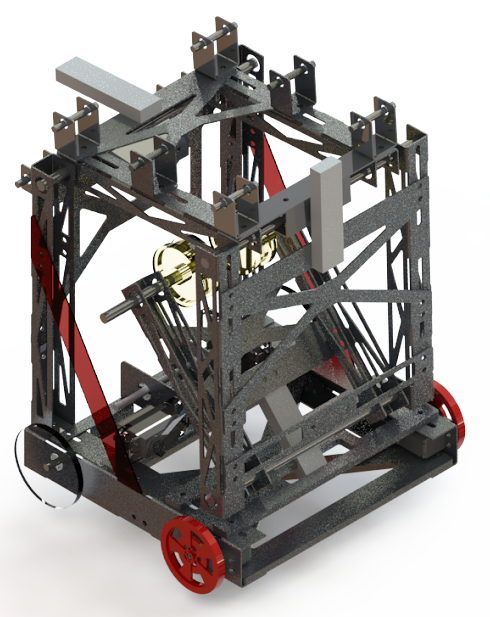
I did the calculations, made the prototypes, tested and edited the design countless times, and found myself in a good place for the amount of time I had left to complete the project. Then I got sick with covid-19. As per the regulations at the time, getting sick with covid meant that I had to stay home for an entire week right at the point in my robot's progress when I needed to work on physically machining the parts. Knowing I would not have time to finish if I continued to hand machine my pieces using the few mills and lathes available in the shop, I redesigned my entire robot to be water-jetted out of flat aluminum and bent into shape and assembled into my final robot.
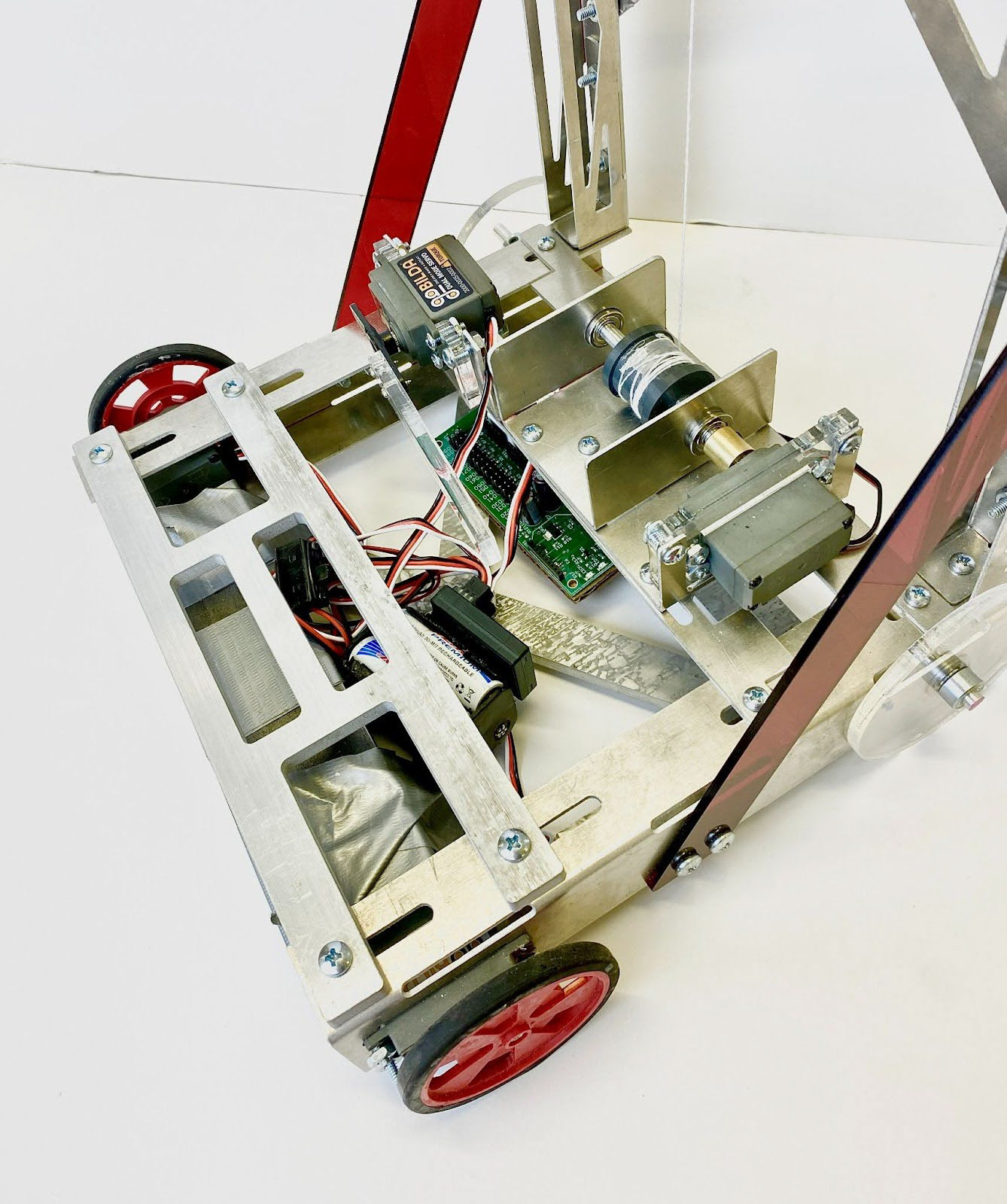
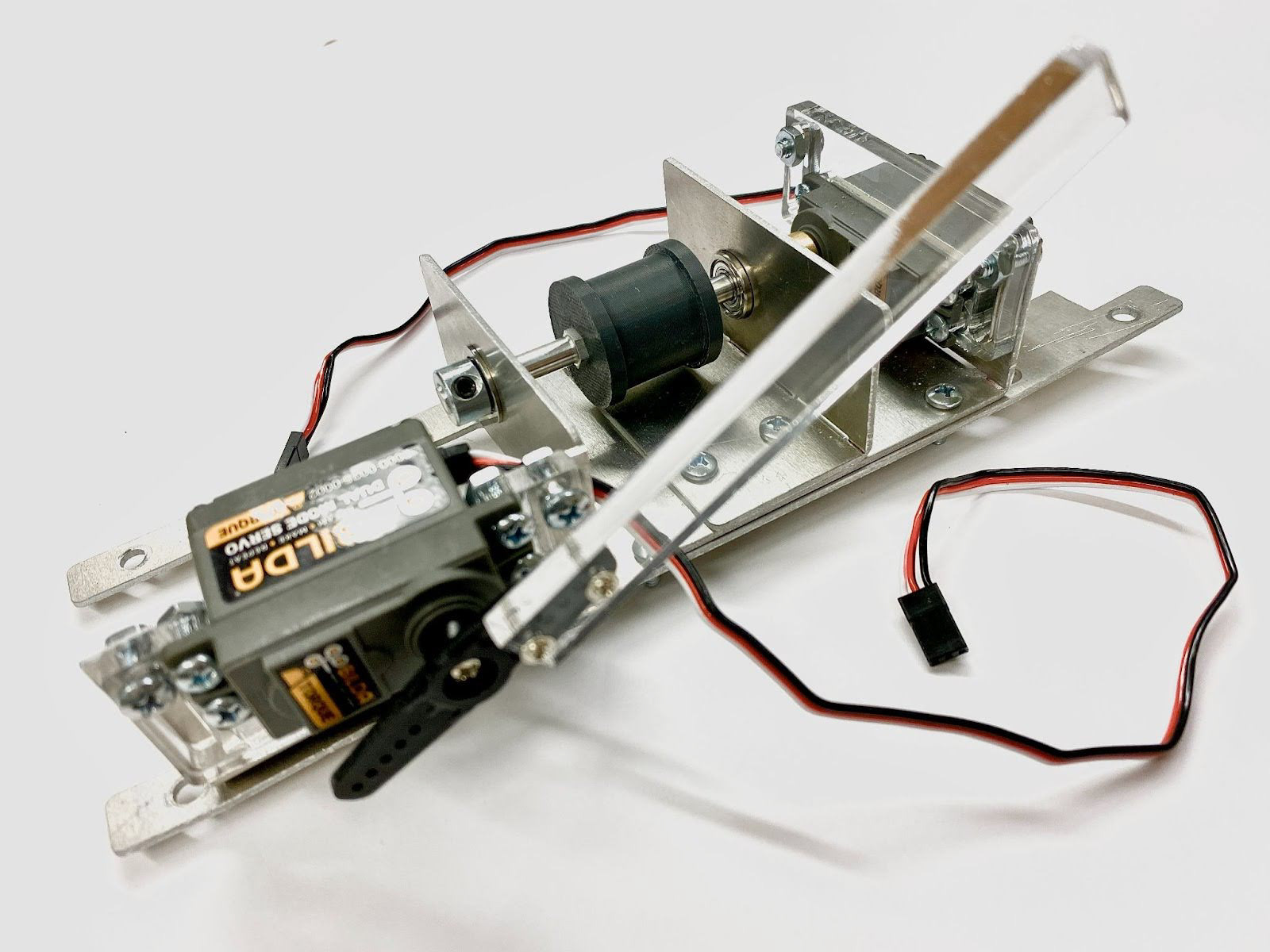
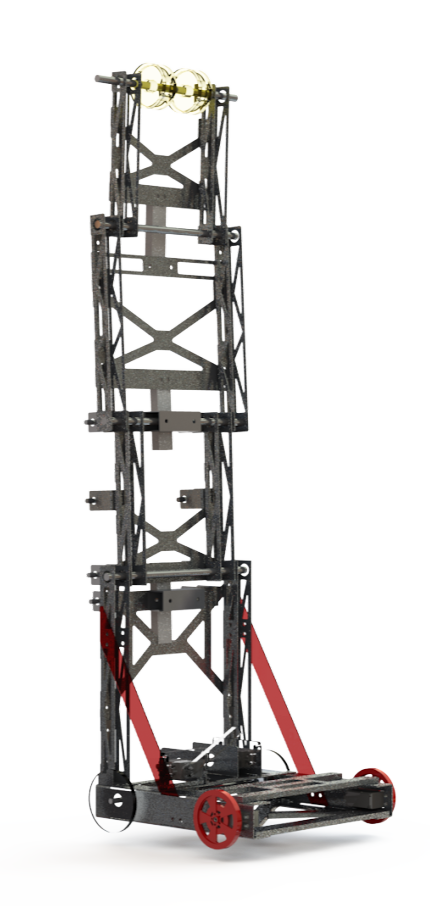
The base consisted of the drive train, winch, and release. The winch is a pretty straightforward design that only required one prototype tested lifting a weight clamped to a table. The release mechanism acts as a pin that holds the robot folded in place at the beginning of the game then actuates out of the way, allowing the structure to spring up for the remaining duration.
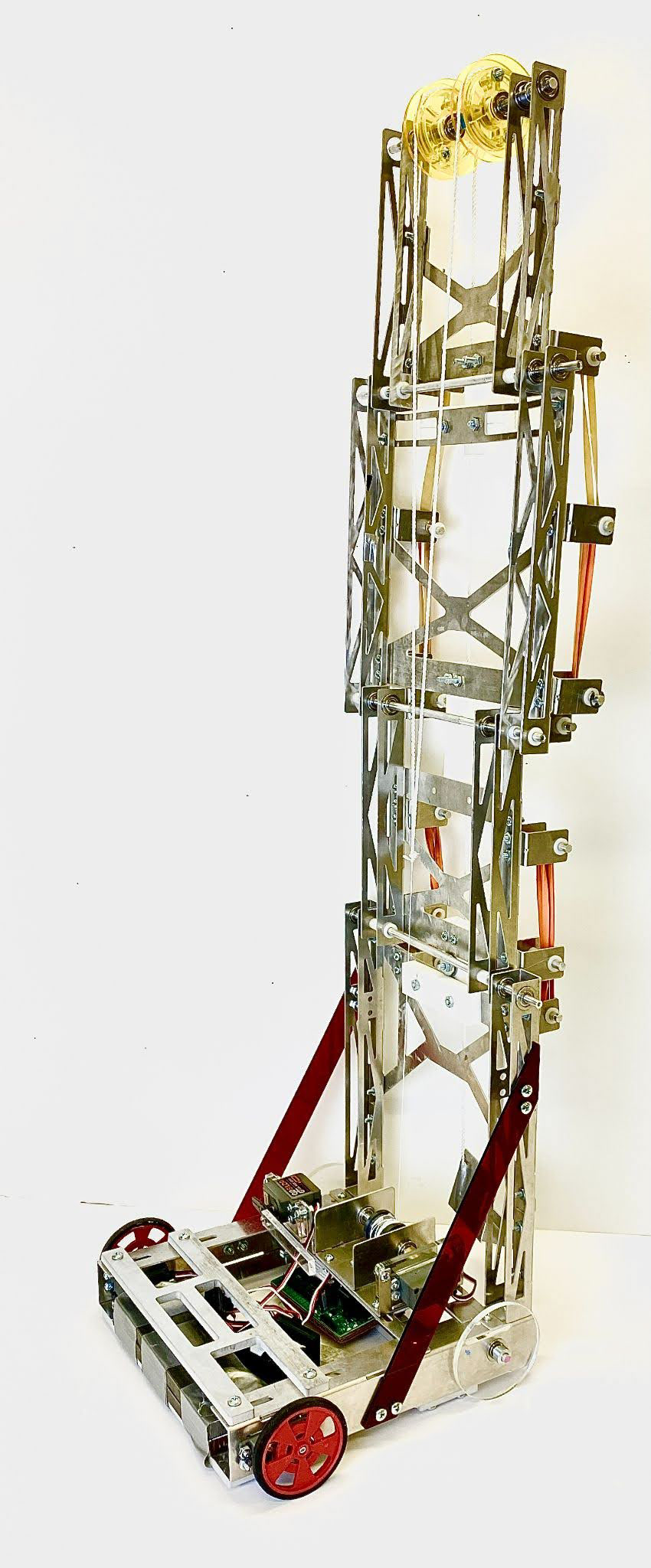
This approach ended up working and allowed me to greatly reduce the weight of the main flipping structure with cutouts that would have taken hours to manually cut on a mill. By the final week I had my robot built and ready to compete. On the gameboard, the robot successfully deployed to full height and managed to lift the beaver up to the highest stage.